Действующий
Примечание - Обязательными мишенями являются любые ТС, предназначенные для передвижения по дорогам общего пользования и большие, чем мотоцикл, с двигателем объемом 125 см3. Опциональными мишенями являются пешеходы, велосипедисты и ТС с двигателем объемом не более 125 см3, при этом мишенями не являются ТС, двигающиеся в противоположном направлении, а также стационарные объекты, включая припаркованные ТС, дорожные знаки и объекты дорожной инфраструктуры.
2.3 прилегающие зоны: Зоны слева и справа от транспортного средства-объекта, а также спереди от транспортного средства-объекта.
1 Левая и правая прилегающие зоны изображены на рисунке 1, передняя прилегающая зона - на рисунке 2.
2 Левая и правая прилегающие зоны предназначены для покрытия соседних по отношению к транспортному средству-объекту полос движения. Однако расположение и размеры этих зон определяются по отношению к транспортному средству-объекту и не зависят от разметки полос движения.


2.4 система мониторинга слепых зон: Система, которая определяет наличие транспортных средств-мишеней в одной или нескольких прилегающих зонах и информирует водителя транспортного средства-объекта.
2.5 скорость сближения: Разность между скоростью транспортного средства-объекта и скоростью транспортного средства-мишени.
2.6 символ: Визуально заметное графическое изображение, используемое для передачи информации независимо от языка, изготовленная с помощью рисунка, печати или других средств.
2.7 окулярные точки водителя: Две точки, удаленные друг от друга на 65 мм и расположенные вертикально на расстоянии 635 мм над точкой R, обозначающей сиденье водителя.
2 Прямая, соединяющая окулярные точки водителя, должна быть перпендикулярна к вертикальной продольной средней плоскости ТС. Центр сегмента, ограниченного двумя окулярными точками, располагается на вертикальной продольной плоскости, которая должна проходить через центр сиденья водителя, определенного изготовителем ТС.
- соответствует теоретическому положению центра вращения бедра относительно туловища при наиболее низком и крайнем заднем нормальном положении сиденья водителя при управлении или использовании, предусмотренном изготовителем ТС.
3.1 Водитель транспортного средства-объекта должен быть проинформирован об ограниченном функционале системы, по крайней мере, в руководстве по эксплуатации. Руководство по эксплуатации должно содержать следующую информацию: "Система предоставляет помощь только в пределах ограниченных зон рядом с транспортным средством. Система не может обеспечить надлежащее предупреждение в отношении транспортных средств, приближающихся сзади".
3.2 Постоянное отключение системы может быть предоставлено пользователю только посредством обученного технического персонала. Возможность постоянного отключения системы посредством обученного технического персонала предоставляется для пользователей, которые находят эту систему раздражающей.
Примечание - На рисунках, приведенных в настоящем стандарте, ТС изображены на дорожном полотне, имеющем разметку. Это не означает, что для работы СМСЗ необходимо распознание или обнаружение дорожной разметки. Дорожная разметка изображена только для справки.
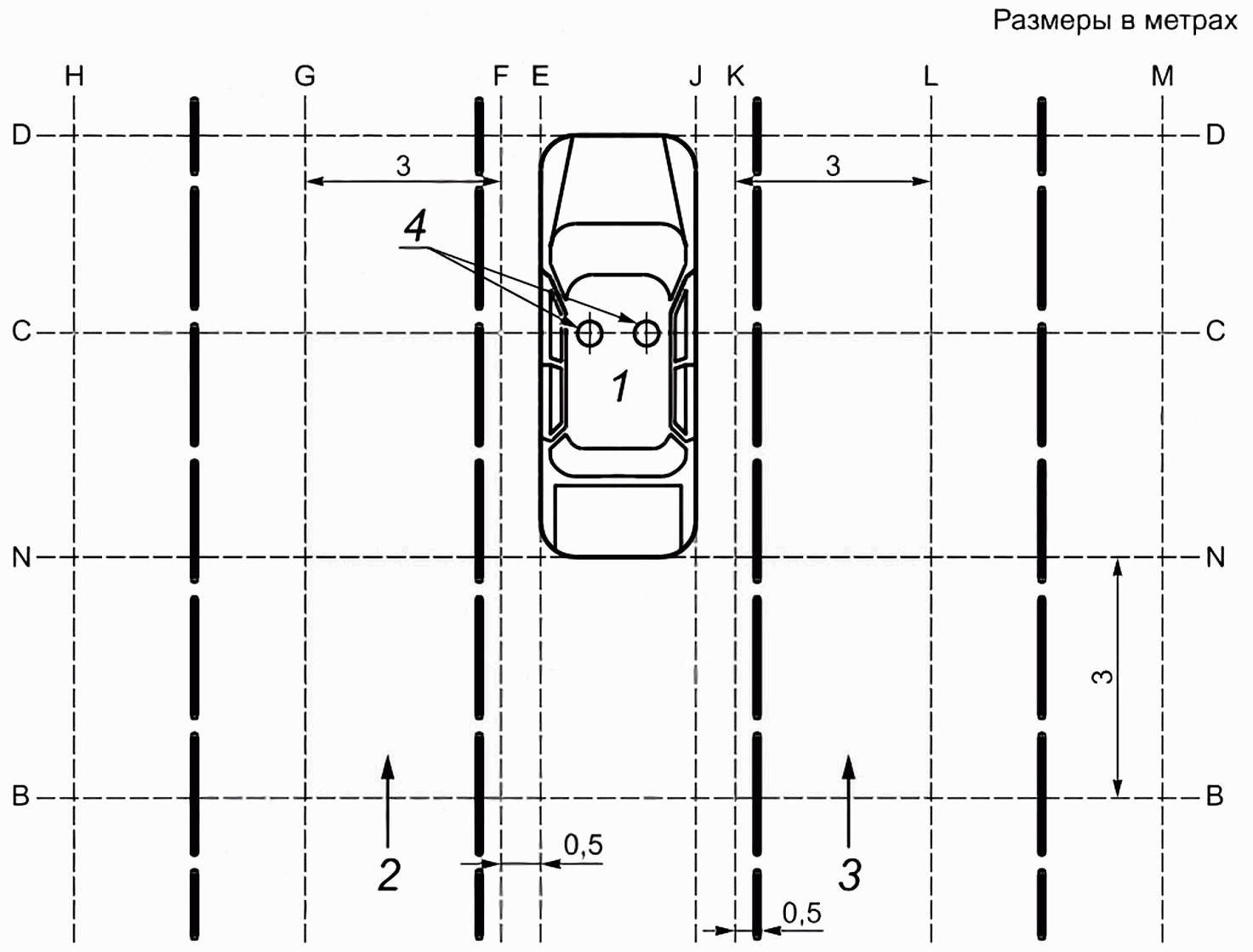
1 - транспортное средство-объект; 2 - левая прилегающая зона; 3 - правая прилегающая зона; 4 - окулярные точки водителя


4.1 СМСЗ должна функционировать, когда ТС движется вперед со скоростью 10 км/ч и более. Допускается функционирование системы на более низких скоростях при движении вперед. Система не должна функционировать, когда включена передача заднего хода или режим парковки.
4.2.1 Для включения визуального сигнала СМСЗ любая часть транспортного средства-мишени должна находиться в прилегающей зоне, размеры и положения которой определены на рисунке 3.
4.2.2 Для ТС категорий N2 и N3, не оснащенных зеркалами класса V в соответствии с положениями [2], визуальный сигнал СМСЗ должен подаваться в том числе при наличии любой части транспортного средства-мишени в прилегающей зоне, определенной на рисунке 4.
4.2.3 Для ТС категорий N2 и N3, не оснащенных зеркалами класса VI в соответствии с положениями [2], визуальный сигнал СМСЗ должен подаваться в том числе при наличии любой части транспортного средства-мишени в прилегающей зоне, определенной на рисунке 5.