Действующий
Эталонная задача представляет собой стандартизированную второстепенную задачу. Эталонную задачу используют для определения степени отвлечения водителя, что приводит к соответствующему уровню результативности выполнения основной задачи. Эталонная задача должна быть однозначной по своей реакции и результативности, и в сочетании с основной задачей результатом должно стать поведение водителя, на основе которого устанавливают эталонный уровень снижения результативности управления транспортным средством. Эталонную задачу, используемую для сравнения различных мест проведения испытаний или испытаний в целом, называют задачей калибровки.
Предложен целый ряд эталонных задач, связанных с управлением автомобилем: например, настройка радиоприемника, описанная в декларации принципов Объединения автомобилестроительных компаний. Однако эти эталонные задачи однозначно не определены и могут изменяться в зависимости от условий выполнения. Другие задачи, не связанные с управлением транспортным средством, были использованы, например, в рамках проекта ADAM [11] и [17], но их также сложно однозначно определить. Как правило, большинство эталонных задач, которые могут применяться при выполнении двух задач (например, в испытаниях на тренажере или в реальных условиях), могут быть использованы и в испытаниях на смену полосы движения.
Примечание - Для определения одной или нескольких задач калибровки, которые могут быть использованы в качестве эталонных задач, применяют ISO/TS 14198 [1].
Вышеуказанное структурное сходство испытаний на смену полосы движения с классическим экспериментом на время реакции (всплывающие обозначения на указателях в качестве стимула, а рулевой маневр рассматривают как реакцию) позволяет вычислить ряд эквивалентов в отношении времени реакции: например, время между появлением обозначения на указателе и началом маневра смены полосы движения. Показатель качества удержания транспортного средства в пределах полосы движения между перестроениями может быть использован по аналогии в исследованиях при моделировании управления транспортным средством. Кроме того, качество маневров смены полосы движения может быть оценено в виде показателя, характеризующего степень отвлечения водителя на выполнение второстепенных задач в процессе испытаний. Также количество пропущенных указателей может быть использовано в качестве дополнительного показателя выполнения требований второстепенной задачи.
Чтобы анализ данных был простым с одной стороны, а с другой стороны, чтобы была возможность применять сложный уровень управления транспортным средством, разработан единый показатель, который охватывает все эти свойства: отклонение (mdev) фактической траектории движения от траектории адаптированной или базовой модели. На рисунке В.1 показано, как различные особенности поведения водителя отражаются на показателе отклонения: плохое выполнение в отношении любой из этих особенностей управления транспортным средством приводит к увеличению индекса отклонения. Более детальный анализ приведен в приложении F.
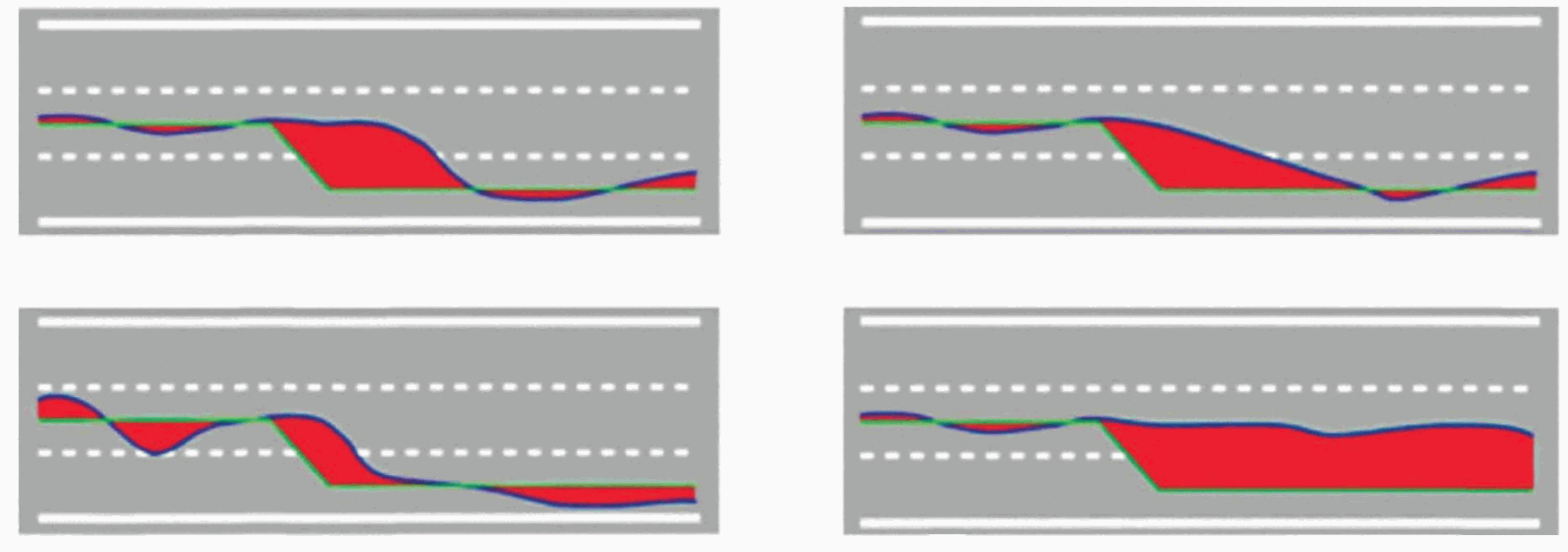
Примечание - На рисунке В.1 показано, как запоздалая реакция (наверху слева), выполнение маневров с малой скоростью (наверху справа), плохое удержание транспортного средства в пределах полосы движения (внизу слева) и пропуск указателей (внизу справа) увеличивают отклонение зафиксированной траектории движения (синяя линия) от траектории адаптированной или базовой модели (зеленая линия). Направление движения - слева направо.
Янг, Реган и Хаммер (2003) определили следующие научные методы измерения степени отвлечения водителя:
Между этими методами имеются существенные различия по отношению к ожидаемому качеству эмпирических исследований и результатам. Каждый из этих методов имеет свои преимущества и недостатки. Основными требованиями к методам измерений являются объективность, достоверность, чувствительность, валидность, интрузивность и эффективность, между которыми существует тесная взаимосвязь, описанная ниже.
Объективность означает, что ни экспериментатор, ни условия эксперимента (лаборатория, оборудование) не оказывают систематического воздействия на результаты. Независимо от места проведения испытаний должны быть получены одинаковые результаты.
Достоверность означает устойчивость или воспроизводимость результатов измерений. Достоверный метод обеспечивает точность результатов измерений в различных испытаниях, различных совокупностях и разных формах. Достоверность отражает точность измерений (как техническую, так и процессуальную).
Чувствительность тесно связана с достоверностью. Чувствительность означает способность к дискриминации. Кроме достоверности, для обеспечения высокой чувствительности необходимо использование мелкомасштабной шкалы. Например, испытания, в которых используют только оценки "хорошо", "средне", "плохо" менее чувствительны, чем те же испытания с применением 10-балльной шкалы.
Валидность означает способность метода выполнять требуемые измерения. В данном случае метод должен измерить или оценить влияние выполнения второстепенной задачи на результативность водителя и ничего больше. Теоретически этот метод должен спрогнозировать увеличение вероятности аварии или других сложных ситуаций при выполнении второстепенной задачи. Валидность тесно связана с реалистичностью сценария. Однако реалистичный сценарий не гарантирует высокую валидность. Также важно отметить, что измеряют только корректные параметры (указанные в требованиях). Кроме того, валидность (в техническом смысле) может быть продемонстрирована только в случае подтверждения достоверности.
Интрузивность можно рассматривать как подкритерий валидности. Если метод измерений при выполнении второстепенной задачи повлиял на выполнение второстепенной задачи или условия управления транспортным средством с использованием ИУС ТС, этот метод нельзя назвать интрузивным, а его валидность может быть сильно снижена.
Эффективность означает, что качество результатов и усилия по их достижению должны быть сбалансированы. Можно оборудовать сотни транспортных средств для выполнения целевой второстепенной задачи и сравнить данные о дорожно-транспортных происшествиях после двух или трех лет в контролируемой группе. Валидность этого метода является достаточно высокой, но издержки, продолжительность и безопасность для участников испытаний являются неприемлемыми. Другой крайностью является заполнение ведомости результатов испытаний силами одного специалиста. Это недорогой подход, но вряд ли он соответствует перечисленным критериям качества (например, объективности).
g) быть полезным практически на всех этапах разработки продукции и в реальных транспортных средствах.
С.3 Испытания на смену полосы движения как сочетание моделирования управления транспортным средством и задачи на реакцию при обнаружении зондового стимула
Испытания на смену полосы движения разработаны для объединения исследований на основе моделирования управления транспортным средством и задач на реакцию при обнаружении зондового стимула [17]. Общие параметры моделирования управления транспортным средством могут быть сильно приближены к реальным условиям. К тому же дорожная ситуация не представляет опасности для участников испытаний, а выполнение действий (например, торможения транспортного средства) может контролировать экспериментатор. Однако чем более реалистичный сценарий при моделировании управления транспортным средством, тем более сложным и неоднозначным может быть анализ данных и его интерпретация. Обычно в процессе моделирования управления транспортным средством измеряют показатели продольного и поперечного управления (наряду с другими), и изменение одного показателя следует интерпретировать с учетом другого показателя. Например, изменение направления движения следует интерпретировать по-разному для водителя, который снижает скорость, если требуется применить ИУС ТС, и для участника испытаний, который предпочитает держать скорость постоянной. Реалистичные сценарии имеют некоторые ограничения. В частности, неожиданные события (например, неожиданно появившийся пешеход на дороге) можно использовать только несколько раз, поскольку в противном случае они не сильно повлияют на водителя. Поэтому достаточно сложно собрать соответствующие данные для обеспечения надлежащего и полноценного статистического анализа.
Задача периферийного обнаружения представляет собой один из примеров так называемой задачи на реакцию при обнаружении зондового стимула. В таких задачах простой стимул (например, звук или малый свет) возникает неоднократно, и обычно участник испытаний должен отреагировать на него простым нажатием кнопки как можно скорее. Время реакции на зондовый стимул измеряют в процессе выполнения участником задачи ИУС ТС. Обычно это представляет собой парадигму выполнения двух задач (см. ниже). Предполагается, что время реакции в этой парадигме отражает свободные когнитивные возможности, и время реакции на зондовый стимул представляет собой индекс когнитивной сложности задач, выполненных одновременно [16]. Когда парадигму реакции на зондовый стимул используют в исследованиях по изучению требований второстепенной задачи в транспортном средстве, ее иногда применяют при выполнении тройной задачи, состоящей из (1) управления транспортным средством (реального или моделируемого), (2) задачи ИУС ТС и (3) задачи на реакцию при обнаружении зондового стимула. Преимуществами парадигмы реакции на зондовый стимул являются эффективное управление экспериментом (по крайней мере, для метода выполнения двух задач), большое количество ответов можно получить в течение ограниченного времени, и вследствие этого высокая достоверность, характерная для экспериментов на время реакции. Недостатком метода выполнения двух задач с измерением времени реакции на зондовый стимул является довольно низкая реалистичность. Вместо управления транспортным средством участники ничего не делают между двумя стимулами, а это вполне может привести к различным стратегиям в отношении распределения внимания по сравнению со сценарием управления транспортным средством. Метод тройной задачи (который включает в себя реальное или моделируемое управление транспортным средством) может быть поставлен под сомнение с точки зрения интрузивности, поскольку тройная задача (обнаружение зондового стимула и реагирование на него) не является ни частью задачи управления транспортным средством в реальных условиях, ни частью задачи ИУС ТС.
Испытания на смену полосы движения имеют признаки как метода моделируемого управления транспортным средством, так и парадигмы реакции на зондовый стимул. Испытания на смену полосы движения можно рассматривать как простое моделируемое управление транспортным средством с обнаружением стимулов (всплывающие указатели) и реакцией на них (инициирование маневра смены полосы движения), заложенными в задачу управления транспортным средством. С другой точки зрения, испытания на смену полосы движения можно рассматривать как парадигму реакции на стимулы с комплексом стимулов (указателей со стрелками), комплексом ответов (рулевого маневра) и задачу удержания транспортного средства в пределах полосы движения между двумя последовательными перестроениями. В этом случае исключено возможное недопонимание, что испытания на смену полосы движения предполагают применение реалистичного моделируемого управления транспортным средством, которое не является обязательным требованием.
Чтобы избежать зависимости между показателями поперечного и продольного управления транспортным средством, последний был полностью исключен. В связи с этим скорость регулируется с использованием программного обеспечения и составляет не более 60 км/ч.
Основной задачей испытаний на смену полосы движения является моделируемая задача управления транспортным средством, которая отражает набор визуальных, когнитивных и моторных требований управления транспортным средством. Основная задача требует определенного внимания для ее надлежащего выполнения. Средний интервал между двумя сменами полосы движения, равный 9 с, был выбран на основе пилотных испытаний, проводимых при разработке испытаний на смену полосы движения. Более длительные интервалы могут привести к нежелательному ряду случаев, когда короткие второстепенные задачи могут быть полностью выполнены между двумя сменами полосы движения. С другой стороны, более короткие интервалы могут сильно усложнить выполнение основной задачи. Выполнение второстепенной задачи одновременно с основной задачей приведет к отвлечению внимания водителя от основной задачи на второстепенную задачу. В результате результативность выполнения основной задачи может измениться и снизиться. В этом случае изменение результативности выполнения основной задачи можно измерить.
Второстепенными задачами (в отличие от вспомогательных задач, используемых для оценки дополнительных возможностей участника в определенной ситуации путем измерения результативности выполнения вспомогательной задачи) являются задачи, выполняемые одновременно с основной задачей. В соответствии с настоящим стандартом при определении второстепенной задачи не существует никаких ограничений при условии, что она совместима с процедурой смены полосы движения (например, обратная связь рулевого управления, которая может зависеть от угла поворота рулевого колеса). Экспериментатор должен выбрать второстепенные задачи, которые предстоит исследовать, и определить, как эти задачи должны быть применены. Примерами второстепенных задач являются: