Действующий
При наличии у машин нескольких номинальных значений полной мощности, тока, линейного напряжения и частоты вращения должны оговариваться значения, принимаемые за базисные. Допускается выражать значение вращающего момента в долях номинального.
Указанная система единиц принята в настоящем стандарте. Строчными буквами обозначены значения величин в относительных единицах, а прописными - в физических единицах.
1.4. Электромагнитные параметры, определяемые настоящим стандартом, соответствуют теории двух реакций. При этом предполагают, что дополнительно к обмотке возбуждения имеются по одному эквивалентному демпферному контуру по продольной и по перечной осям машины (за исключением пп.25-27).
В связи с этим стандарт предусматривает методы определения трех индуктивных сопротивлений (синхронного, переходного и сверхпереходного) и двух постоянных времени (переходной и сверхпереходной) - по продольной оси, двух индуктивных сопротивлений (синхронного и сверхпереходного) и одной постоянной времени - по поперечной оси, а также определение постоянной времени обмотки якоря, замкнутой накоротко.
Постоянные времени определяют из условия, что соответствующие переходные составляющие токов и напряжений изменяются по экспоненциальному закону.
Если кривая изменения рассматриваемой составляющей, полученная опытным путем, не является чисто экспоненциальной (например, у машин с массивным ротором) в качестве эквивалентной постоянной времени следует принимать время, в течение которого эта составляющая уменьшается до  =0,368, своего первоначального значения. Кривые затухания, соответствующие этим постоянным времени, должны рассматриваться как эквивалентные кривые, заменяющие действительные кривые, полученные по данным измерений.
=0,368, своего первоначального значения. Кривые затухания, соответствующие этим постоянным времени, должны рассматриваться как эквивалентные кривые, заменяющие действительные кривые, полученные по данным измерений.
При определении параметров по переходным функциям и частотным характеристикам ротор машины следует рассматривать как многоконтурный (пп.25-27).
1.5. Для всех параметров, за исключением синхронных индуктивных сопротивлений, под "насыщенным" значением параметра следует понимать его значение при номинальном напряжении якоря, а под "ненасыщенным" - значение при номинальном токе якоря.
Значение параметра при номинальном напряжении якоря должно соответствовать магнитному состоянию машины при внезапном коротком замыкании на выводах обмотки якоря, которому предшествует работа машины в режиме холостого хода с номинальным напряжением при номинальной частоте вращения.
Значение параметра при номинальном токе якоря должно соответствовать магнитному состоянию ненасыщенной машины при протекании в обмотке якоря тока с номинальным значением основной гармонической составляющей.
Для возможности сопоставления опытных параметров и постоянных времени следует указывать способ и значение тока и напряжения, при которых производилось их определение.
2.1. Определение равномерности радиального зазора между ротором и статором следует производить с помощью щупов или другого измерительного инструмента. При длине сердечника статора 300 мм и более зазор следует измерять с обоих торцов машины.
Для машин с неявновыраженными полюсами измерение необходимо производить не менее чем в трех точках, равномерно расположенных по длине окружности.
Для машин с явновыраженными полюсами измерения должны производиться под серединой каждого полюса. Допускается проведение измерений не под каждым полюсом, но не менее чем в четырех точках, равномерно расположенных по окружности.
В машинах с подшипниковыми щитами зазор необходимо измерять в 3-4 точках в зависимости от числа отверстий в щитах.
Оценку равномерности зазора следует производить по отношению максимальной разности между измеренными радиальными размерами зазоров в местах измерения к их среднему значению.
Если в подшипниковых щитах отверстия отсутствуют, а другим способом щуп или другой измерительный инструмент не может быть применен, то размер зазора следует определять как половину разности диаметров внутренней расточки статора и внешней поверхности ротора.
2.2. Определение формы внутренней поверхности статора необходимо производить измерением зазора под одним и тем же полюсом, поворачивая ротор каждый раз на одно полюсное деление.
Определение формы поверхности ротора следует производить измерением зазора в одной и той же точке статора, поворачивая ротор каждый раз на одно полюсное деление. Обе эти операции могут быть совмещены. Если многократный поворот ротора на одно полюсное деление трудно осуществим, допускается измерять зазор под всеми полюсами при двух диаметрально противоположных положениях ротора относительно статора.
3. Измерение сопротивления изоляции обмоток относительно корпуса машины и между обмотками, сопротивления изоляции термопреобразователей сопротивления и сопротивления изоляции подшипников и уплотнений
3.1. Измерение сопротивления изоляции обмоток относительно корпуса машины и между обмотками, сопротивления изоляции термопреобразователей сопротивления и сопротивления изоляции подшипников и уплотнений - по ГОСТ 11828-86.
4. Измерение сопротивления обмоток и термопреобразователей сопротивления при постоянном токе в практически холодном или нагретом состоянии
4.1. Измерение сопротивления обмоток и термопреобразователей сопротивления при постоянном токе в практически холодном или нагретом состоянии, а также температур охлаждающих сред - по ГОСТ 11828-86.
6. Испытание изоляции обмоток на электрическую прочность относительно корпуса машины и между обмотками
6.1. Испытание изоляции обмоток на электрическую прочность относительно корпуса машины и между обмотками напряжением частотой 50 Гц, а также выпрямленным или комбинированным напряжением - по ГОСТ 11828-86.
7.1. Испытание междувитковой изоляции обмоток на электрическую прочность - по ГОСТ 11828-86 и ГОСТ 183-74.
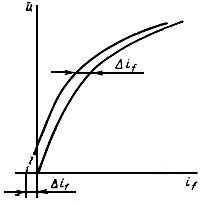
7.2. Выявление междувитковых замыканий в обмотке возбуждения следует производить методом измерения сопротивления обмоток при переменном токе. Измерения должны проводиться при напряжении 3 В на виток, но не более 220 В, подводимом к обмотке возбуждения. При пониженном сопротивлении изоляции обмотки возбуждения по отношению к корпусу следует применять разделительный трансформатор.
У синхронных машин с явновыраженными полюсами измерения напряжения при неизменном токе рекомендуется производить у каждого полюса в отдельности или у двух полюсов. У неявнополюсных машин с обмоткой возбуждения, расположенной на роторе, измерения следует производить на всей обмотке в целом при трех-четырех ступенях частоты вращения (включая номинальную и в неподвижном состоянии), поддерживая приложенное напряжение или ток неизменными.
Для возможности сравнения результатов последующие измерения необходимо производить при тех же значениях тока или напряжения и неизменном состоянии машины (вставленный или вынутый ротор, разомкнутая или замкнутая обмотка якоря и т.п.).
Отклонение от предыдущих результатов измерения, а также отклонение сопротивления каждого полюса от среднего значения сопротивления полюсов (для явнополюсных машин) или резкие изменения сопротивления при изменении частоты вращения могут указывать на возникновение междувитковых замыканий.
Окончательный вывод о наличии и числе устойчиво замкнутых витков может быть сделан после определения характеристики короткого замыкания и ее сравнения с ранее снятой.
Допускается применение специальных приборов и способов, обеспечивающих необходимую надежность и точность выявления витковых замыканий.
8.1. Характеристику холостого хода машины, представляющую зависимость напряжения обмотки якоря от тока возбуждения, следует определять при холостом ходе и номинальной частоте вращения в режиме генератора. Допускается определение характеристики холостого хода в режиме ненагруженного двигателя.
При определении характеристики холостого хода следует измерять ток возбуждения, линейное напряжение и частоту (или частоту вращения).
Для оценки третьей гармонической составляющей при соединении обмотки статора в звезду необходимо также измерять фазное напряжение, а при соединении в треугольник - фазный ток.
Если при определении характеристики холостого хода частота ( ) отличается от номинальной (
) отличается от номинальной ( ), то напряжения холостого хода (
), то напряжения холостого хода ( ) необходимо пересчитать по измеренным значениям напряжения (
) необходимо пересчитать по измеренным значениям напряжения ( ) по формуле
) по формуле
Изменение тока возбуждения при снятии характеристики холостого хода следует производить плавно и только в одном направлении, начиная с наибольшего значения тока, равного, если возможно, номинальному току возбуждения, но не ниже значения, соответствующего 1,3 номинального напряжения испытуемой машины.
Точки, при которых производят отсчеты по приборам, должны распределяться по характеристике по возможности равномерно.