Действующий
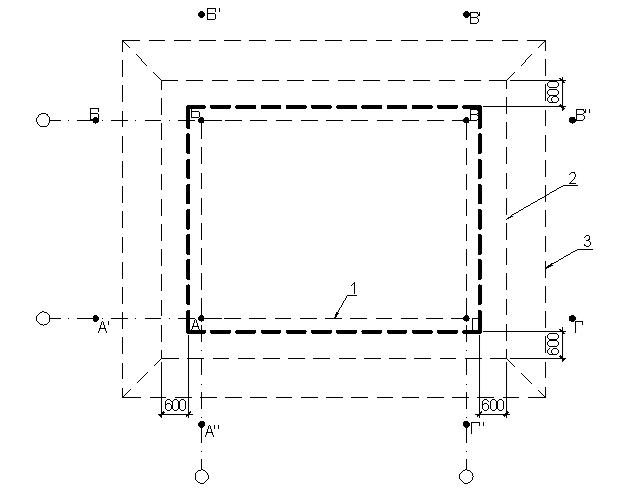
Рис. 1. Разметка котлована на местности, где А, А’, A’’,Б, Б’, Б’’,В, В’,В’’,Г, Г’,Г’’ – метки геодезической разбивочной основы здания;
2 – габариты основания котлована с учётом зоны для производства работ рабочими и внешних габаритов здания;
А) Если конструкция здания в основании представляет собой простую фигуру, см. рис. 1 (квадрат, прямоугольник, треугольник), то объём котлована определяется по формуле усеченной пирамиды:
Б) Если конструкция здания в основании представляет собой сложный многоугольник (рис. 2), то, для определения его площади, его необходимо разбить на боле простые фигуры (прямоугольник, квадрат, треугольник), и высчитать площади каждой фигуры, а затем суммировать их.

1. Технологический процесс устройства котлованов включает разработку грунта с погрузкой в транспортные средства или на бровку котлована, транспортировку грунта, планировку дна и откосов.
2. В качестве ведущей машины при разработке постоянных выемок значительной глубины, котлованов и траншей больших размеров принимают одноковшовый экскаватор.
3. При комплексно-механизированной разработке грунта кроме ведущей землеройной машины в комплект включаются также вспомогательные машины для транспортировки и планировки грунта.
В технических характеристиках экскаваторов любой марки приведены, как правило, максимальные показатели их: радиусы резания, выгрузки, высота выгрузки и др. Работа на максимальных для данной машины параметрах приводит к ее быстрому износу и, как следствие, к снижению ее производительности.
Для производства земляных работ следует принимать оптимальные рабочие параметры, составляющие 0,9 максимальных паспортных данных  , а именно
, а именно
Оптимальная высота (глубина) забоя должна быть достаточной для заполнения ковша экскаватора за одно черпание, она должна быть равна вертикальному расстоянию от горизонта стоянки экскаватора до уровня напорного вала, умноженному на коэффициент 1,2:
Выбор способа разработки грунта и схемы комплексной механизации зависят от объемов и сроков выполнения работ, вида грунта, геометрических параметров земляного сооружения и условий производства работ. В зависимости от ширины котлована выделяют основные 4 способа разработки грунта (см. рис. 3):

а - лобовая проходка; б - уширенная лобовая; в - поперечно-торцовая; г - боковая проходка; д - разработка котлована двумя лобовыми проходками;
Экскаватор и транспортные средства должны быть расположены таким образом, чтобы средний угол поворота экскаватора от места заполнения ковша до места его выгрузки был минимальным, так как на поворот стрелы расходуется до 70% рабочего времени цикла екскаватора (см. рис. 4)
